极端紧凑空间下的流道优化
扫地机器人正向小型化、超薄化演进,留给吸尘风道与循环系统的空间极其局促。流体仿真面临微小特征尺寸与大尺度空间并存的网格划分难题:
-空间受限:扁平化的机身要求风道必须进行剧烈的转折与压缩,极易产生局部驻点或严重的流动分离,导致静压损失激增。
-非标准路径:在无法满足标准扩散段要求的有限空间内,如何通过仿真优化流道壁面的曲率,以维持高风压输出,是设计的核心难点。
复杂内环境下的多相流与干扰耦合
机身内部密布锂电池、驱动电机及机械臂传动结构,形成了复杂的“障碍物阵列”:
-热流耦合:电池与电机的高发热量会改变空气密度与粘度,流体仿真需考虑共轭传热(CHT),防止热量堆积影响算法芯片的算力稳定性。
-地面效应:扫地机贴地运行的特殊性,使得吸口处的流场受地面摩擦与缝隙射流影响显著,存在严重的湍流干扰,仿真需精准捕捉离地间隙对吸力的非线性影响。
噪声与振动(Aero-acoustics)的协同管控
电机高转速与窄流道的挤压造成严重的气动噪声。在追求高性能的同时,静音化成为高端化布局的关键:
-宽频噪声: 需通过大涡模拟(LES)捕捉风道内的压力脉动,识别气动噪音源。
-隔离度与一致性:紧凑空间下,风扇振动易与塑胶壳体产生共振。仿真需结合流固耦合(FSI),预测在不同行走振动与温湿度环境下,流体循环系统的量产性能稳定性与一致性。
针对扫地机器人的流体动力学与颗粒动力学仿真,以Fluent计算流体力学及Rocky离散元仿真(DEM)为核心,提供从气动布局、毛发缠绕到复杂工况下垃圾捕捉效率的完整方案。针对扫地机器人内部空间狭小、吸力衰减快、复杂地面颗粒多等挑战,支持动网格、大涡模拟及非球形颗粒追踪,精准预测风道压损、吸口流场分布、颗粒回收率及声学噪声。
ANSYS平台具备强大的多源模型整合能力,可直接导入MCAD(如STEP,IGS, SAT 等),完整保留扫地机器人的异形风道、旋转滚刷、离心风扇及滤网支架等几何细节。无需简化即可将整机外壳、电池仓热源、电机模型与风路结构进行整合,实现流体+颗粒+热+噪声的一体化仿真。
ANSYS Fluent 与 Rocky 的协同应用方案
1. 高效风道设计与吸力优化 (Fluent)
针对机身设计约束带来的复杂流道设计,Fluent 的伴随求解器 (Adjoint Solver) 可通过灵敏度分析自动优化风道壁面形状,最大限度降低局部驻点带来的能量损失利用高精度的湍流模型(如 SST k-omega 或 SBES)捕捉吸口处的复杂旋涡,提升对缝隙积尘的抽取能力。
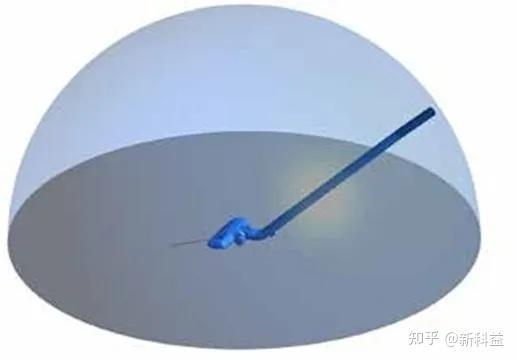
如图为吸尘器的流道仿真分析模型。
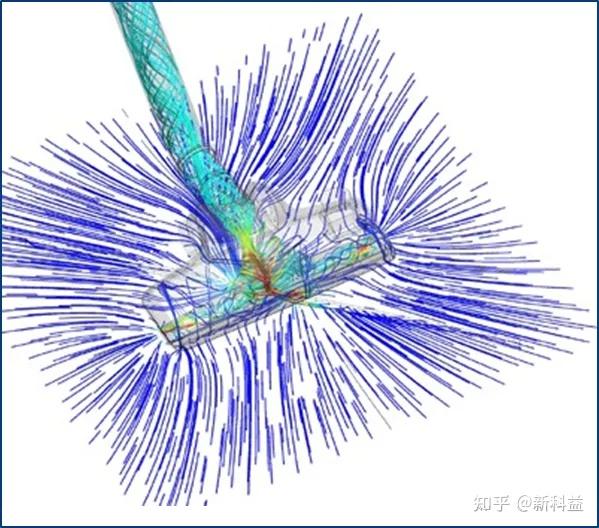
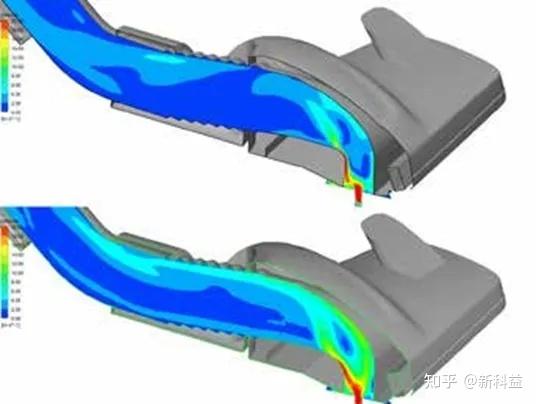
仿真分析的吸尘器头部附近气流状态以及流道设计的气动性能对比如下图所示。
吸尘器的流场分析
吸尘器流道设计方案对比
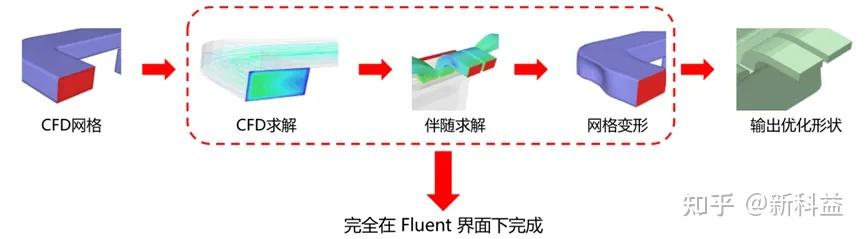
伴随求解器作为Fluent内置功能,可基于已有结果和设计优化目标,分析结构各位置的设计敏感性,并输出优化后的设计方案。
Fluent的伴随求解器优化过程
2. 风扇气动噪声分析(Fluent)
Fluent具备强大的气动噪声分析能力,可分析风扇、管路等部件带来的噪声问题。通过气动声学模型分析风扇叶片与蜗壳的相互作用,预测频谱特征,在设计阶段降低高频啸叫。
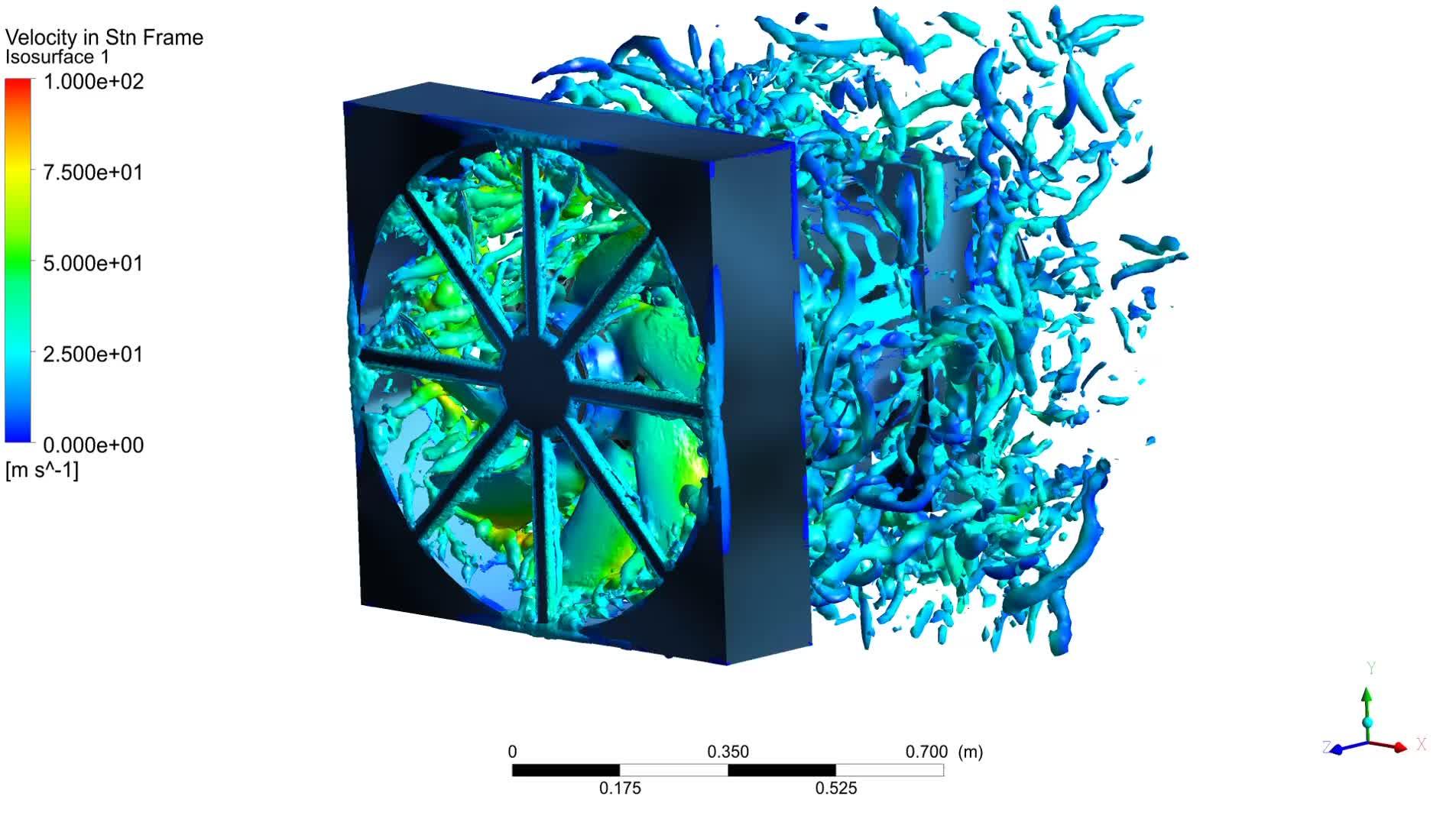
00:11
视频1:风扇流动仿真
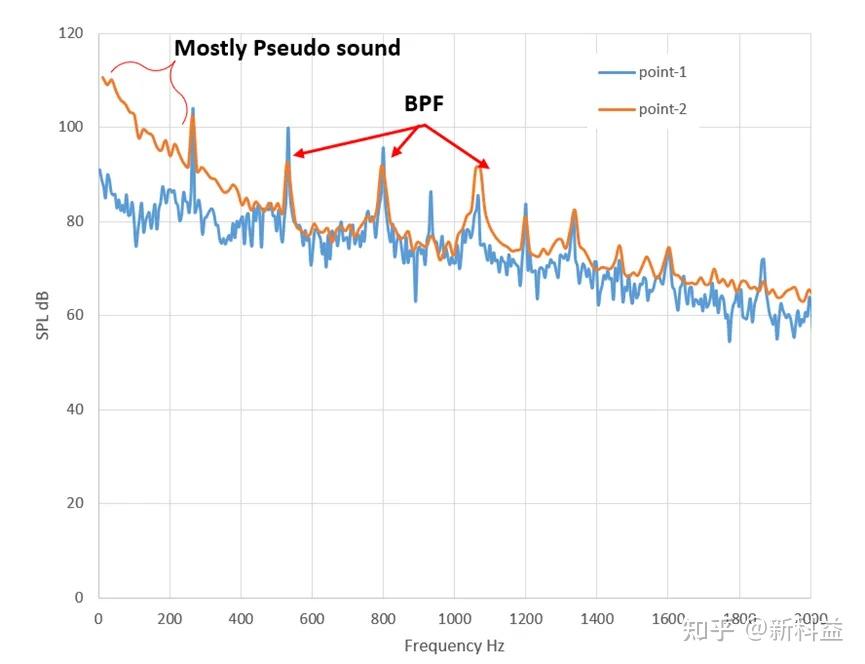
基于已有的瞬态流动分析结果,Fluent内置傅里叶变换功能,可分析不同位置的总声压级和频谱分布。
风扇的气动噪声频谱
3. 真实颗粒仿真 (Rocky)
Rocky 能模拟真实世界中具有特定形状、质量和材料特性的固体颗粒(如毛发、碎纸屑、零食渣等)具体行为:
-颗粒之间的碰撞、颗粒变形、摩擦、固体表面接触与反弹、颗粒破碎
-颗粒-流体双向耦合:计算气流如何带动颗粒运动,同时模拟大量的颗粒对气流场的反作用,精确评估滤网阻塞过程
-复杂颗粒形态:借助Rocky的先进颗粒建模方法,可模拟非球形颗粒、长纤维毛发在滚刷处的缠绕逻辑,优化防缠绕梳齿结构
-Rocky可自行建立设备运动过程,并和Fluent保持同步
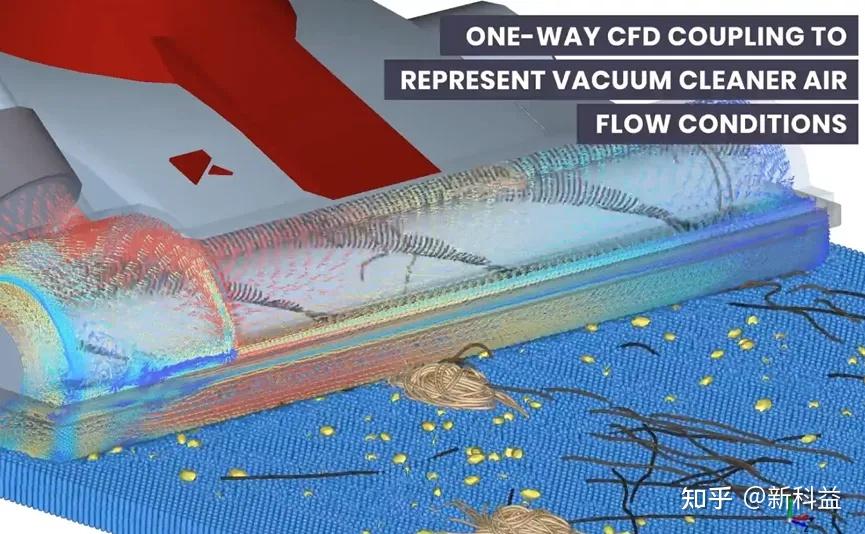
视频中,展示了Fluent和Rocky耦合仿真分析吸尘器吸尘过程,其中采用了Fluent和Rocky的单向耦合
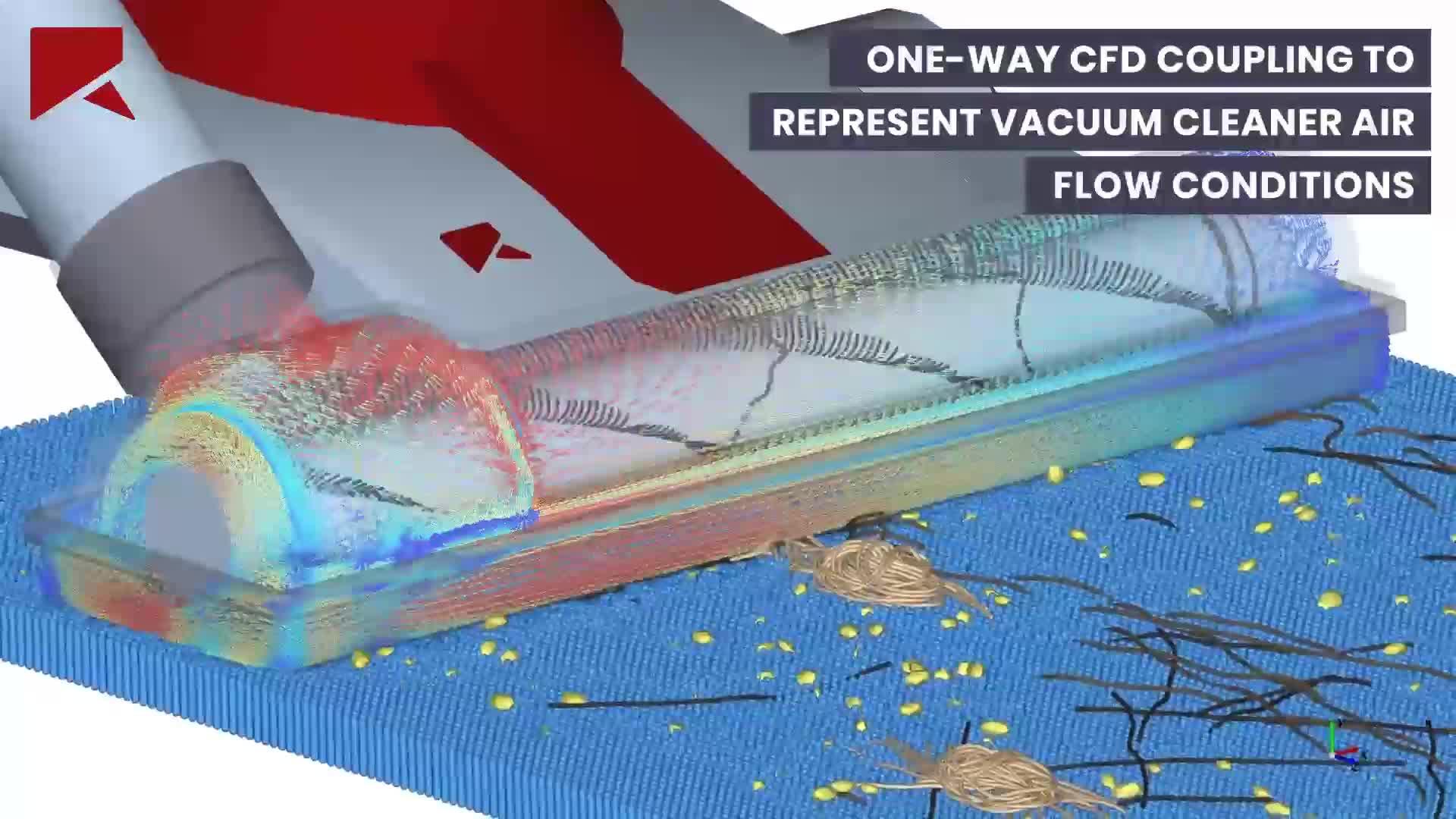
00:29
视频2:Rocky-Fluent耦合仿真分析吸尘器的工作过程
视频中,展示了吸尘器收集罐中,毛发缠绕堆积的过程,其中采用了Fluent和Rocky的单向耦合

00:15
视频3:吸尘器收集部分的纤维堆积缠绕过程
视频中,比较了硬毛和橡胶两种材质刷毛的吸尘滚筒工作效率。其中硬毛和橡胶刷毛均采用纤维型颗粒建模。
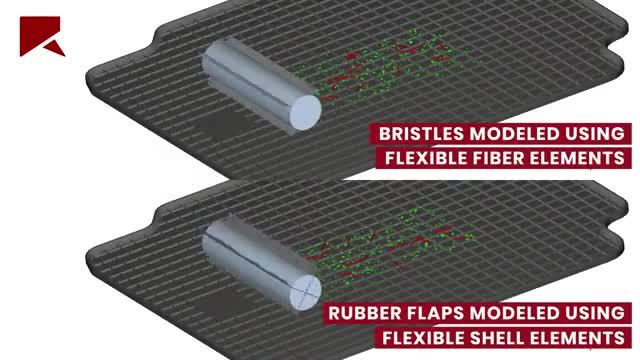
00:57
视频4:吸尘器滚筒设计对比