机器人是具有两个或两个以上可编程的轴,以及一定程度的自主能力,可在其环境内运动以执行预期的任务的执行机构,主要包括机械结构、驱动机构和控制器等。按用途可以分为以下几大类:工业机器人、服务机器人、特种机器人等。各类机器人设备在产品研发以及追求卓越创新上,也都面临着不同层面的挑战:
技术复杂性高:机器人涉及机械、电子、控制、人工智能等多学科交叉,要具备更高的运动能力与自我平衡能力,更强的感知与智能交互能力,设备需要具备极高的分辨率和准确性,涉及多种物理场相互作用和同时发生;
研发投入大:机器人的研发和制造成本非常高,这使得机器人的商业化应用面临较大的经济压力。开发一款高性能的机器人涉及到复杂的硬件、传感器、软件和算法的研发,成本高昂,尤其是在人形机器人需要具备高精度的运动能力和感知能力时,制造过程的复杂性就会进一步提高。
国际竞争激烈:全球机器人市场主要由少数几家国际巨头企业垄断,国内企业面临着巨大的竞争压力,技术壁垒高,国内企业需要不断突破技术难关,提高自身的核心竞争力。
核心仿真需求点
机器人、机械手及机械臂
机器人仿真是机器人研发过程中的关键环节,核心内容涵盖从基础建模到高级应用的全流程,涉及运动学、动力学、感知、控制、环境交互等多个维度。以下是机器人运动仿真的主要内容分类及关键技术要点:
仿真与AI赋能人形机器人产品落地线下研讨会:
|
日程
|
演 讲 课 题
|
|
13:0013:30
|
签到
|
|
13:3013:50
|
仿真与AI如何赋能人形机器人产品落地
|
|
13:5014:20
|
Ansys Motion助力人形机器人精准运动与动力学优化仿真
-步态规划与稳定性仿真
-关节协同运动精度优化
|
|
14:2014:50
|
人形机器人结构强度以及疲劳可靠性的仿真实践
-关键部件强度极限仿真验证
-长期运行疲劳寿命预测
-跌落冲击结构抗损性分析
|
|
14:50
15:20
|
驱动电机仿真:助力人形机器人高效可靠动力系统设计
-全流程电机设计-仿真-系统控制方案
-扭矩输出动态特性及电机效率评估
|
|
15:20
15:40
|
茶歇
|
|
15:40
16:10
|
“铁人”也怕热,散热仿真方案应对热管理难题
-极端工况下多部件(电池 / 电机 / 电控)温度把控
-散热结构高效仿真优化
-控等板级散热方案
|
|
16:10
16:40
|
Ansys Optics赋能人形机器人光学感知系统仿真验证
-复杂环境光适应性分析
-光学传感器布局优化
|
|
16:40
17:00
|
SCADE ONE:塑造安全可靠的人形机器人“神经中枢”
-基于模型的控制逻辑开发
-功能安全与可靠性验证
|
|
17:0017:20
|
Q&A
|
扫描二维码立即免费报名

咨询电话:021-52238788(24小时咨询热线)
咨询热线:16621331590 /13818663071
咨询邮箱:tea@cadit.com.cn
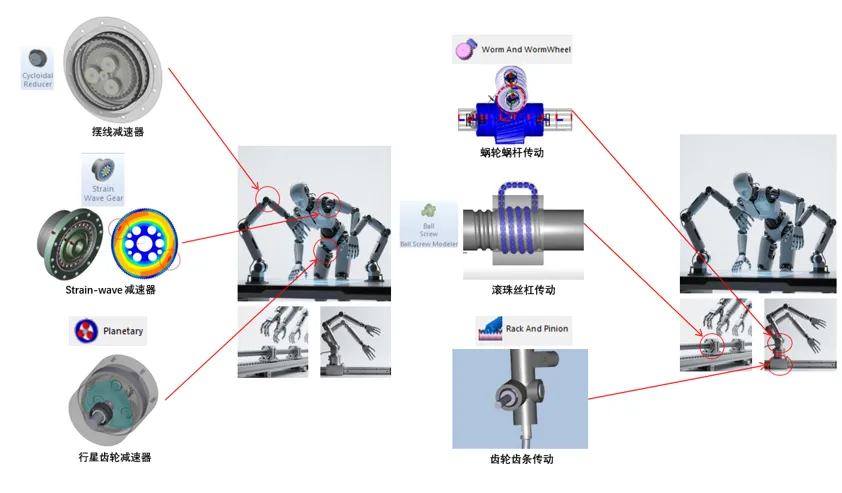
机械臂运动仿真:
关节电机, 减速器:行星齿轮减速器,摆线减速器,Strain-wave减速器;
齿轮,齿条,连杆结构:齿轮/齿条,涡轮/蜗杆, 滚珠/丝杠,单连杆,多连杆。
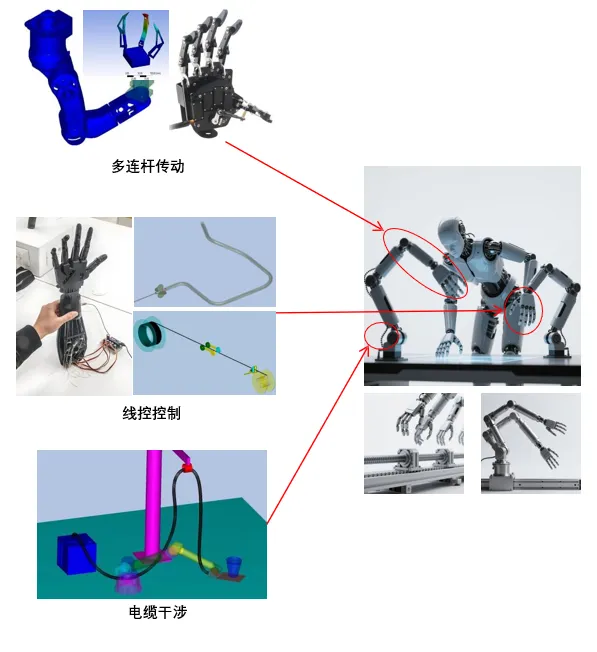
灵巧手运动仿真:
连杆运动控制:基于刚柔耦合多连杆运动控制;
线控运动控制:Motion Cable功能实现线控仿真模拟。
 运动仿真与控制系统耦合:
Motion & Matlab 耦合:基于Matlab(simulink)进行运动->控制耦合;
Motion & Twinbuilder 耦合:基于Twinbuilder 进行运动->控制耦合。
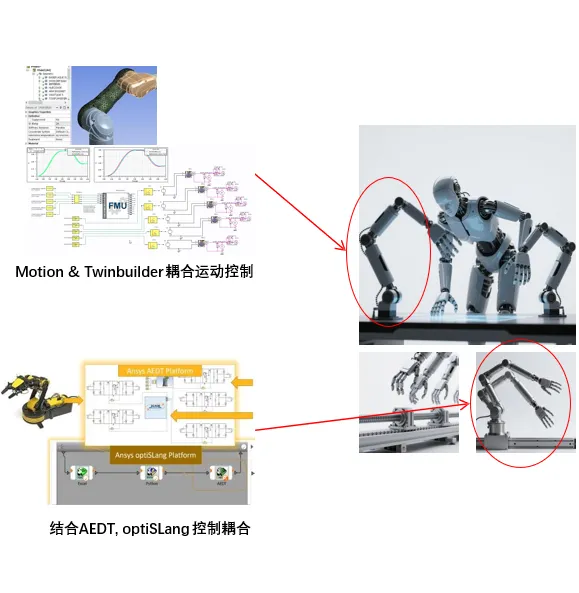
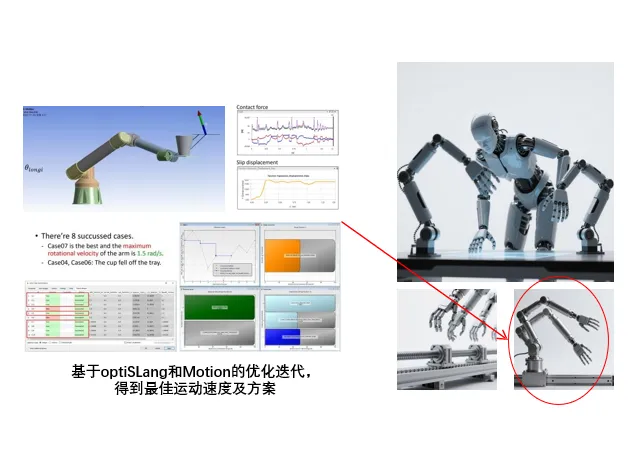
运动仿真与优化:
Motion & optiSlang:基于Motion和optiSLang 有机结合,实现不同场景,不同工况的机械手结构,运动优化仿真。
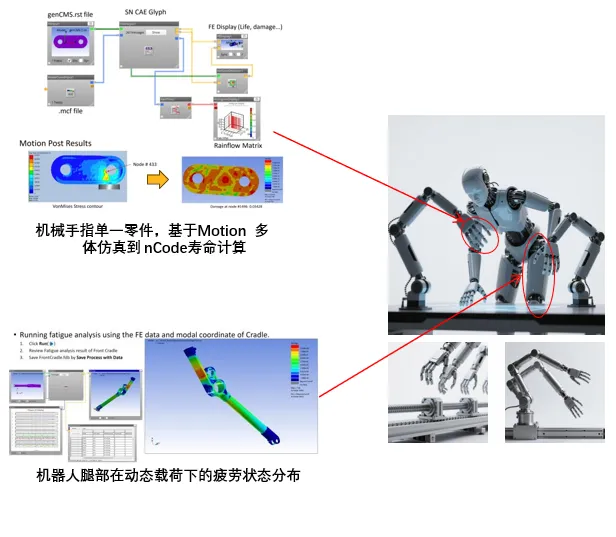
运动仿真与疲劳预测:
Motion & nCode:基于Motion和nCode 仿真流程,实现动力学运动仿真到零部件寿命预测的流程。
ANSYS Motion机械人运动结构仿真应用
ANSYS Motion是一款专注于多体动力学仿真的工具,适用于机器人系统的运动学、动力学、控制及多物理场耦合分析。ANSYS Motion的一个关键优势在于它能精确建模和仿真机器人手臂各个组件(如关节、链接和致动器)之间错综复杂的相互作用。这项功能使工程师能够评估机械臂的性能,并确定任何可能需要改进的地方或问题。此外,ANSYS Motion 还提供各种分析工具和功能,使工程师能够研究不同因素对机械臂性能的影响,这包括检查各种控制策略的效果、优化机械臂的轨迹以及评估其稳定性和安全性。
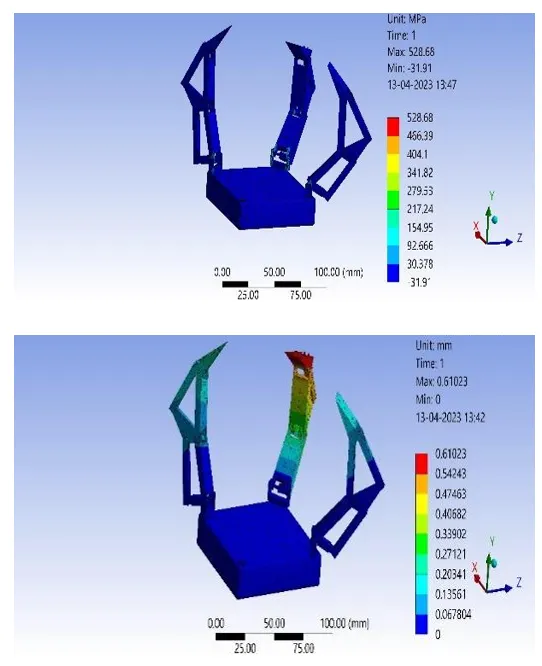
1. 灵巧手仿真
灵巧手仿真是机器人仿真领域的重要分支,专注于模拟具有多自由度、高灵活度的人手或类人机械手的运动、抓取和精细操作能力。其核心目标是在虚拟环境中复现灵巧手的动力学特性、环境交互行为及智能控制策略,为医疗机器人、服务机器人、工业精密操作等应用提供研发支持。
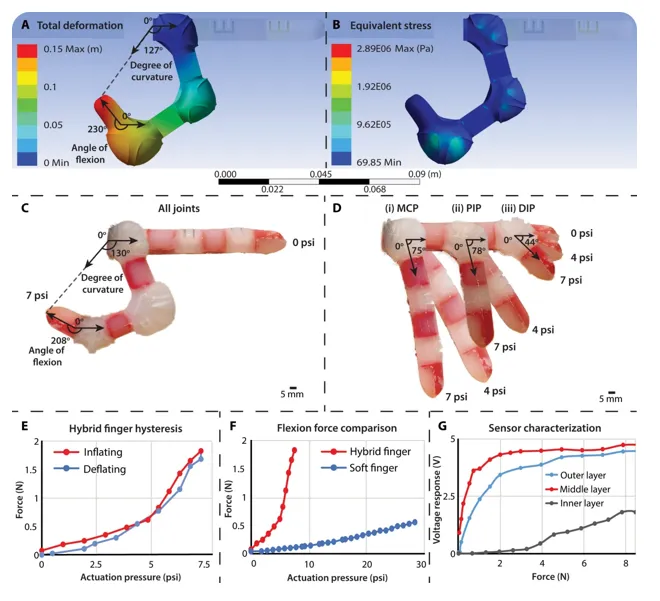
2. 灵巧手‒手指分析
对混合机器人手上的单个混合仿生手指进行了有限元分析。在结构分析中,将标准PLA材料数据和龙皮的超弹性材料模型应用于混合手指的刚性和柔性部件。混合指中的所有三个致动器都在7 psi(48.26 kPa)的压力下启动,总变形和等效von Mises应力如图A和B所示。混合仿生手指实现了127°的曲率和230°的屈曲角,没有出现故障点。
3. 机械臂仿真
机械臂仿真是机器人研发中的核心环节,旨在通过数字化手段模拟机械臂的运动、力学行为及环境交互,为设计优化、控制算法验证和系统集成提供虚拟测试平台。
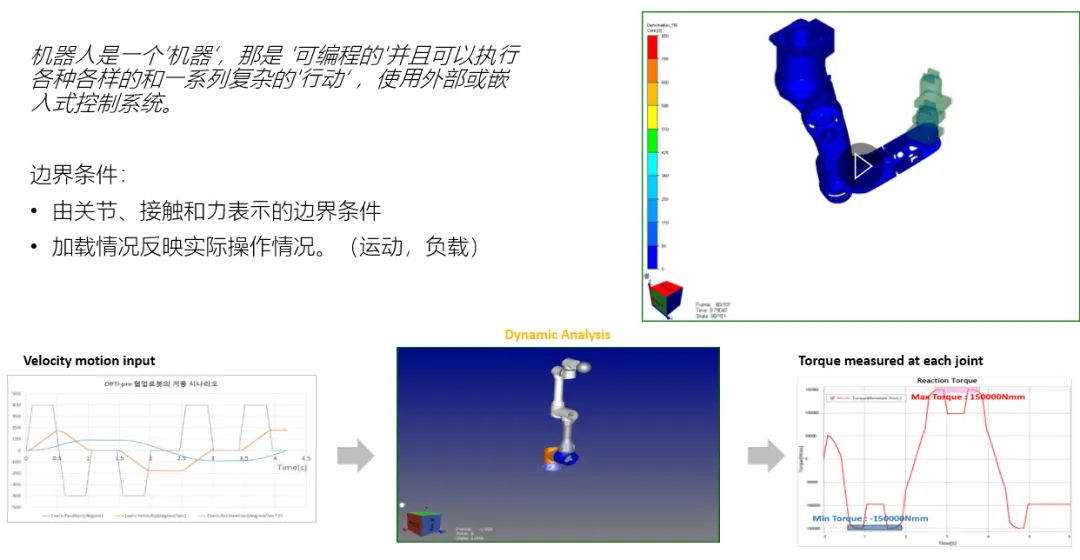
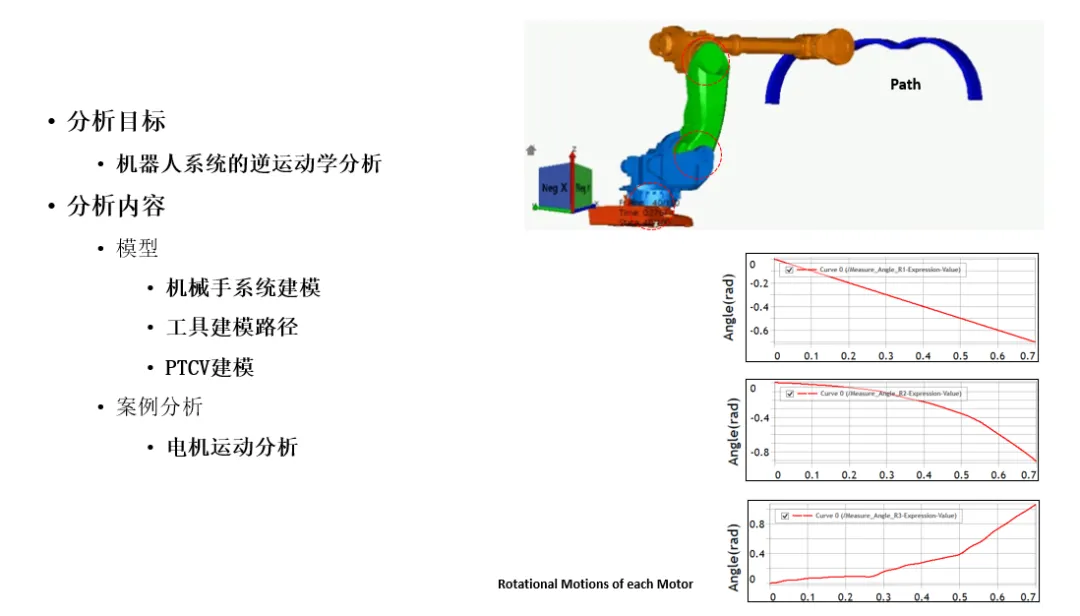
4.逆向运动仿真
逆向运动仿真(Inverse Kinematics Simulation)是通过计算机算法,在已知末端执行器目标位姿(位置和姿态)的情况下,逆向求解机器人各关节变量的过程。它在机器人轨迹规划、虚拟调试、动画制作等领域具有广泛应用。
5. 工业机器人仿真
工业机器人仿真是通过数字化建模与模拟技术,在虚拟环境中验证机器人设计、运动控制及生产流程的关键手段,广泛应用于汽车制造、电子装配、物流仓储等领域。
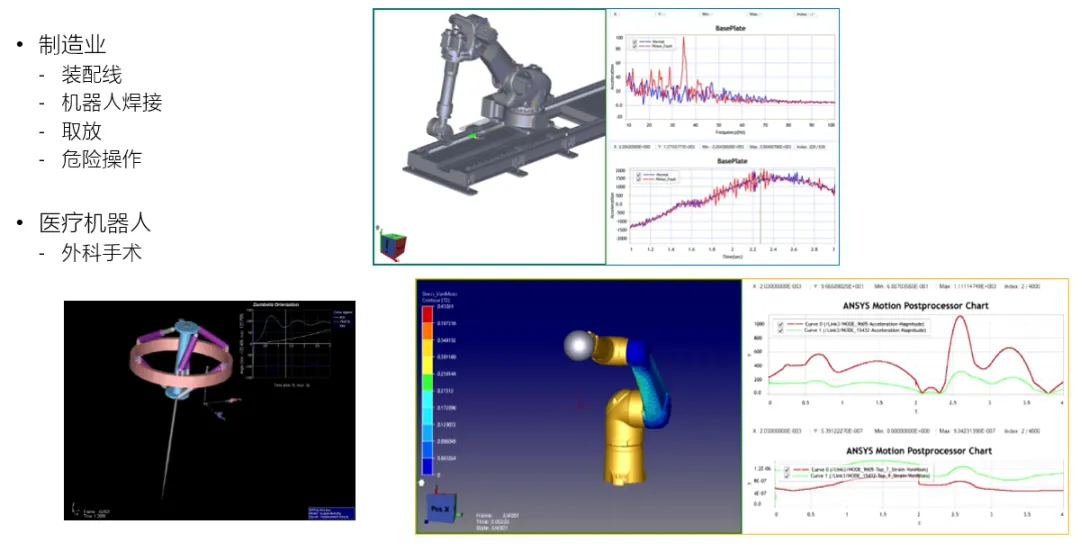
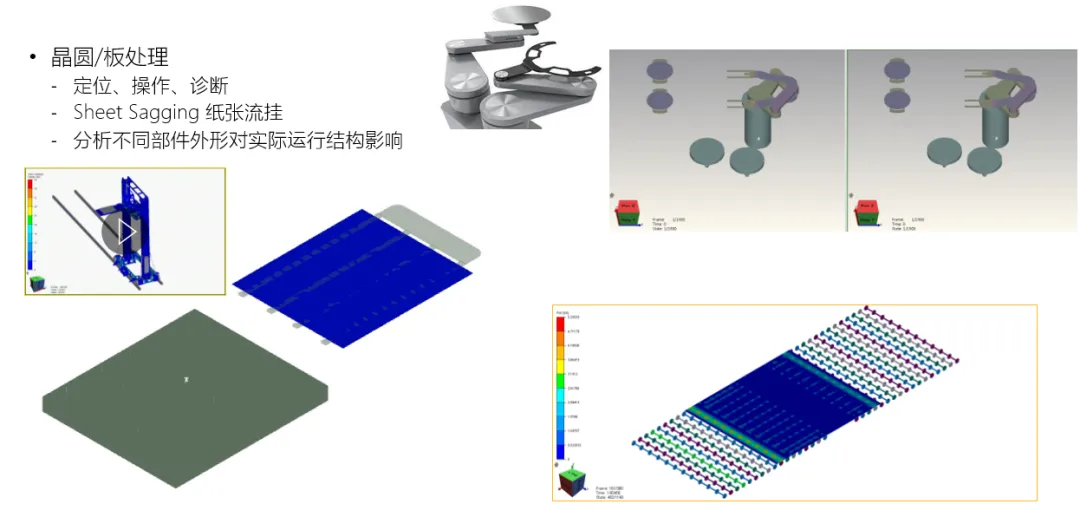
6. ⾼科技机器⼈仿真
高科技机器人仿真是指利用先进的数字化技术,对具备高度智能化、复杂运动能力或特殊应用场景的机器人进行高保真建模与虚拟测试的过程。这类仿真不仅涵盖传统运动学和动力学分析,还需集成人工智能、多物理场耦合、实时交互等前沿技术。
7. 协同机器人仿真
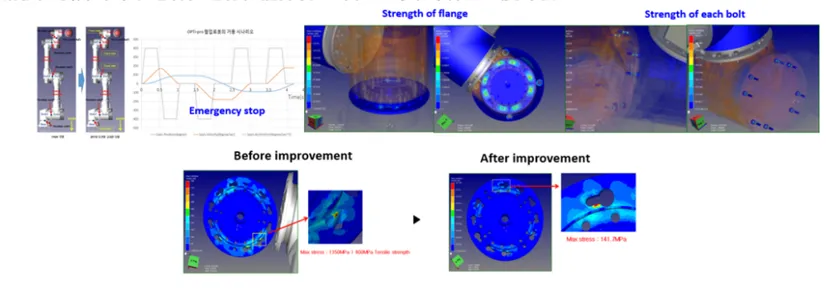
协同机器人(Collaborative Robot)仿真是针对能够在共享工作空间中与人类安全交互的机器人进行的虚拟建模与测试过程。其核心目标是验证机器人的安全性、灵活性和协作效率,涵盖从基础运动控制到高级人机交互的全流程。
分析目标
-通过动态分析对OPTi-pro(协作机器人)进行性能验证和改进,以传输5Kg的有效载荷
仿真内容
-通过分析特定场景的行为来提取机制设计所需的数据
-通过柔性体的动态分析检查强度
-正常运行模式和紧急停止情况下主要组件的性能
-根据极限载荷对每个电动机进行性能分析,螺栓和每个零件的强度评估
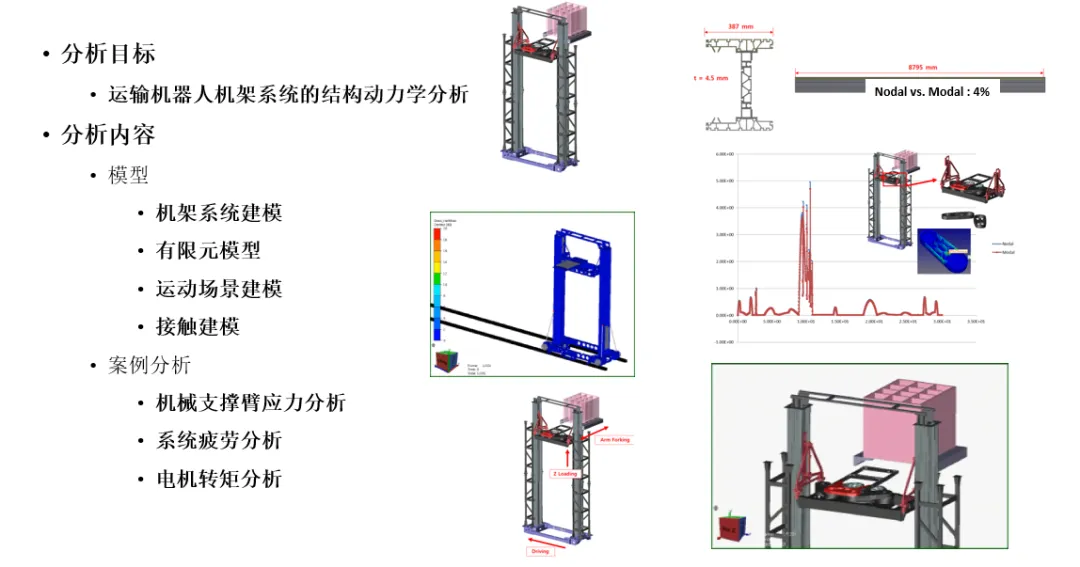
 8. 运输机器人仿真
运输机器人仿真是针对物流、仓储、制造等场景中用于物料搬运的自主移动机器人(AMR)、自动导引车(AGV)等进行的虚拟建模与测试过程。其核心目标是验证机器人的导航精度、任务效率、多机协同能力以及与环境的动态交互。
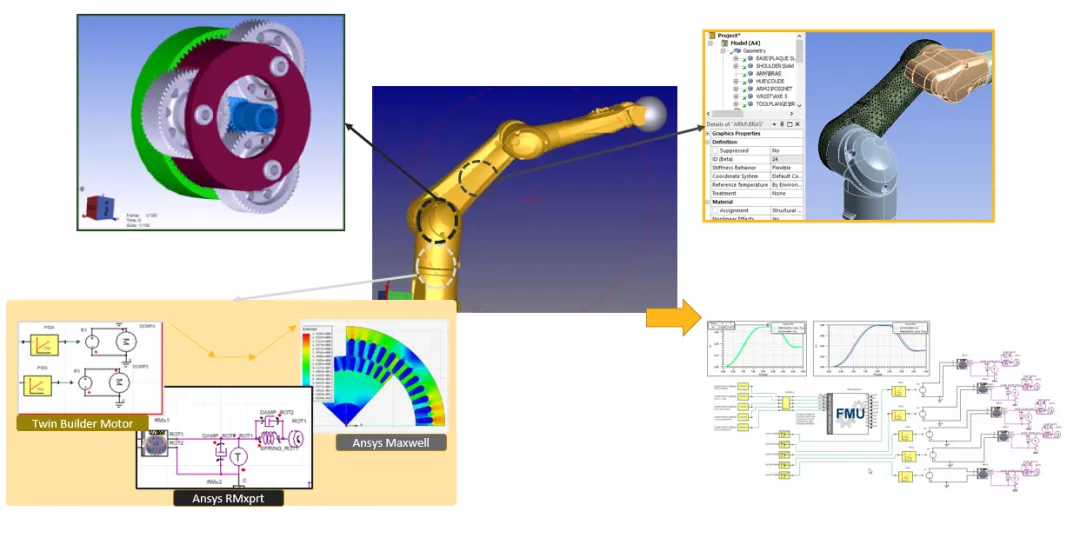
9. 机器⼈中的子系统仿真
机器人子系统仿真是对机器人系统中独立功能模块进行精细化建模与测试的过程,通过分解复杂系统为可管理的单元,实现高效验证与优化。
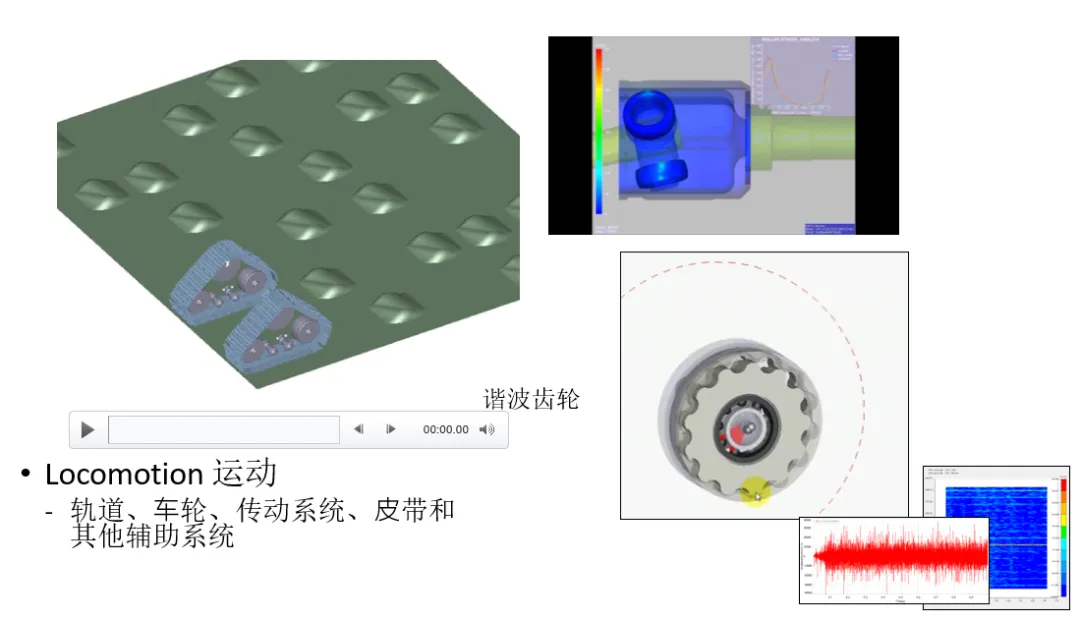
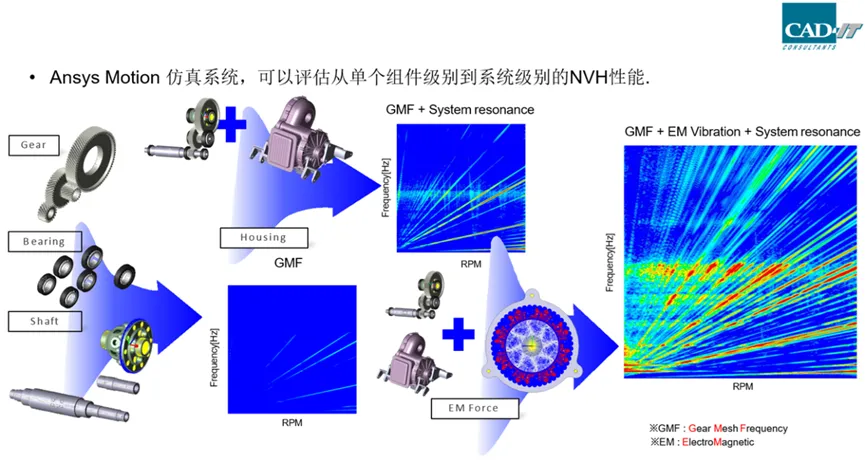
10. 齿轮NVH仿真
机器人齿轮NVH(噪声、振动与声振粗糙度)仿真是针对齿轮传动系统在运行过程中产生的振动噪声问题进行建模与分析的关键技术,直接影响机器人的运动精度、寿命和用户体验。ANSYS Motion可以在Workbench集成平台下,能够高效处理机械-控制-热-电等多学科耦合问题,更加精准的模拟NVH问题。
11. 总结
ANSYS Motion在机器人仿真中提供了一套完整的解决方案,涵盖运动学、动力学、控制、接触、多物理场耦合及Sim2Real验证。其优势在于:
- 更快的仿真速度:ANSYS Motion优秀的求解器可以显著提升大规模自由度系统的仿真速度,且在SMP并行环境下,求解速度会进一步大幅提升;
- 可靠且高精度的仿真结果:隐式算法保证了仿真结果的稳定和精度;
- 紧密集成多体和结构仿真求解器:可以同时求解刚体、柔性体、力实体和连接副的控制方程;
- 适用于大规模自由度系统仿真分析:专门为刚体和柔体混合系统定制的稀疏矩阵求解器已验证,可以很好地处理大规模自由度系统仿真分析;
- 3D面接触:ANSYS Motion可以很好地支持3D面接触,包括小面和NURBS两种类型;
- 支持模态和节点柔性体分析方法:ANSYS Motion同时支持节点和模态柔性体,并可以自由选择;
- 提供便利接口:ANSYS Motion通过脚本、FMI可以与其他软件集成交互,并提供了专门的MATLAB接口;
- 多学科协同仿真(与Fluent/Maxwell/Mechanical耦合);
- 支持数字孪生(结合实测数据优化模型)。
未来,结合AI加速计算和云仿真,ANSYS Motion 在机器人领域的应用将更加广泛。
|